Entradas y Salidas analógicas (ADC y PWM)
Entradas analógicas
El ADC es un modulo interno que tiene el microcontrolador ESP32, el cual su función es convertir unas señal de voltaje a un valor equivalente en binario, este valor determinado por la resolución del convertidor.
Características del ADC
- Voltaje de entrada
0Va3.3V - Resolución de 12 bits
- Valor en decimal de
0a4095 - El valor mas pequeño que podemos medir es de 0.8mV o 800uV (en teoría)
- Tenemos 11 canales disponibles para utilizar (los demás no los podemos usar si usamos el framework de Arduino)
Los pines a los que se puede conectar son los que indican ADCx CHx, lo cual significa Canal X ADC. Nota: Recuerda que hay pines que no podemos utilizar.

Note
No se necesita inicializar el pin como entrada, solo se usa la función analogRead(pin).
// de esta manera utilizaríamos la función y guarda el dato en una variable
int valueADC = analogRead(noPin);
Note
Se recomienda colocar un capacitor de 0.1uF en la entrada del ADC para reducir el ruido, junto con multimuestra para reducirlo lo máximo posible. Ir a documentación oficial
Danger
NUNCA se debe exceder de 3.3V a la entrada del ADC, ni voltajes negativos, esto dañaría de manera parcial o total el microcontrolador.
Hay varias características avanzadas relacionadas al ADC que no se van a tratar.
Leyendo una entrada analógica
Vamos a realizar una lectura básica de un ADC y mandar ese valor a la monitor serial.
Material
| Cantidad | Descripción |
|---|---|
| 1 | Placa ESP32 |
| 1 | LED |
| 1 | Pot 10k |
Diagrama pictórico

Código
#define pinADC 34 //pin que sera leído del ADC
// the setup routine runs once when you press reset:
void setup() {
// inicializamos el monitor serial a 115200 baudios
Serial.begin(115200);
}
// the loop routine runs over and over again forever:
void loop() {
//se lee el pin del ADC y se guarda en la variable valueADC
int valueADC = analogRead(pinADC);
Serial.println(valueADC);// se imprime el valor del ADC
delay(10); // para la estabilidad del valor de entrada
}
Barra de LEDs con potenciómetro
Vamos a realizar una lectura del ADC e ir encendiendo los LEDs en función del valor que tengamos de entrada, es decir, entre mas valores, mas se prenderán, y entre menor sea el valor, menos encenderán.
Material
| Cantidad | Descripción |
|---|---|
| 1 | Placa ESP32 |
| 1 | LED |
| 1 | Pot 10k |
| 3 | LEDs |
| 3 | R330 |
Diagrama pictórico

Código
#define pinADC 34 //pin que sera leído del ADC
#define LED1 33 //Configuro el pin en donde colocaré el LED
#define LED2 25 //Configuro el pin en donde colocaré el LED
#define LED3 26 //Configuro el pin en donde colocaré el LED
// the setup routine runs once when you press reset:
void setup() {
// inicializamos el monitor serial a 115200 baudios
Serial.begin(115200);
pinMode(LED1, OUTPUT); //configuro como salida el pin para el led
pinMode(LED2, OUTPUT); //configuro como salida el pin para el led
pinMode(LED3, OUTPUT); //configuro como salida el pin para el led
}
// the loop routine runs over and over again forever:
void loop() {
//se lee el pin del ADC y se guarda en la variable valueADC
int valueADC = analogRead(pinADC);
Serial.println(valueADC); // se imprime el valor del ADC
if (valueADC < 100) { // si esta por debajo de este valor, se apagando todos los LEDs
digitalWrite(LED1, LOW);
digitalWrite(LED2, LOW);
digitalWrite(LED3, LOW);
} else if (valueADC > 100 && valueADC <= 1500) { // si esta en este rango prenderá los leds indicados
digitalWrite(LED1, HIGH);
digitalWrite(LED2, LOW);
digitalWrite(LED3, LOW);
} else if (valueADC > 1500 && valueADC <= 3000) { // si esta en este rango prenderá los leds indicados
digitalWrite(LED1, HIGH);
digitalWrite(LED2, HIGH);
digitalWrite(LED3, LOW);
} else { //si es mayor a 3000, se encienden todos los leds
digitalWrite(LED1, HIGH);
digitalWrite(LED2, HIGH);
digitalWrite(LED3, HIGH);
}
delay(10); // para la estabilidad del valor de entrada
}
Control crepuscular (Sensor de luz)
Vamos a encender el LED cuando hay poco luz, de lo contrario se debe apagar.
Material
| Cantidad | Descripción |
|---|---|
| 1 | Placa ESP32 |
| 1 | LED |
| 1 | R330 |
| 1 | R10k |
| 1 | LDR |
Diagrama pictórico

Código
#define pinADC 34 //pin que sera leído del ADC
#define LED1 25 //Configuro el pin en donde colocaré el LED
#define LIMIT 2500 //ESTE VALOR SE CAMBIA CON BASE AL AJUSTE DEL SENSOR
// the setup routine runs once when you press reset:
void setup() {
// inicializamos el monitor serial a 115200 baudios
Serial.begin(115200);
pinMode(LED1, OUTPUT); //configuro como salida el pin para el led
}
void loop() {
int valueLDR = analogRead(pinADC); //leemos el pin del ADC
Serial.print("Valor del ADC: ");
Serial.println(valueLDR);
if (valueLDR > LIMIT) {
digitalWrite(LED1, HIGH);
} else {
digitalWrite(LED1, LOW);
}
delay(10); // para la estabilidad del valor de entrada
}
Control crepuscular (Sensor de luz) con PROMEDIO
Este circuito toma la lectura del sensor de luz, imprime ese valor y también hace el calculo del promedio de 50 muestras, para dar un valor mas estable de salida. Para ver como se ve el resultado utilizar el serial plotter de IDE o algún otro software para gráficar datos de comunicación serial.
Material
| Cantidad | Descripción |
|---|---|
| 1 | Placa ESP32 |
| 1 | LED |
| 1 | R330 |
| 1 | R10k |
| 1 | LDR |
Diagrama pictórico
Código
#define pinADC 34 //pin que sera leído del ADC
// the setup routine runs once when you press reset:
void setup() {
// inicializamos el monitor serial a 115200 baudios
Serial.begin(115200);
}
float promedio = 0.0;
long suma = 0;
int contador = 0;
void loop() {
int valueADC = analogRead(pinADC);
Serial.print("Luz:");
Serial.print(valueADC);
Serial.print(",");
if (contador < 50) {
suma += valueADC;
contador++;
} else {
promedio = (float)suma / 50.0;
contador = 0;
suma = 0;
}
Serial.print("Promedio:");
Serial.println(promedio);
delay(500);
}
Gráfica obtenida

Software utilizado: Serial Test
Semáforo con Sensor de Luz
Vamos a encender el LED cuando hay poco luz, de lo contrario se debe apagar.
Material
| Cantidad | Descripción |
|---|---|
| 1 | Placa ESP32 |
| 3 | LED |
| 3 | R330 |
| 1 | R10k |
| 1 | LDR |
Diagrama pictórico

Simulación

Código
#define LED1 32 //ROJO
#define LED2 33 //AMARILLO
#define LED3 25 //VERDE
#define pinADC 34 //pin que sera leído del ADC
#define LIMIT 2000
// the setup function runs once when you press reset or power the board
void setup() {
pinMode(LED1, OUTPUT);
pinMode(LED2, OUTPUT);
pinMode(LED3, OUTPUT);
digitalWrite(LED1, LOW);
digitalWrite(LED2, LOW);
digitalWrite(LED3, LOW);
Serial.begin(115200);
}
// the loop function runs over and over again forever
void loop() {
int valueLDR = analogRead(pinADC); //leemos el pin del ADC
Serial.print("Valor del ADC: ");
Serial.println(valueLDR);
if (valueLDR < LIMIT) {
digitalWrite(LED1, HIGH);
Serial.println("Enciende rojo");
delay(2000);
digitalWrite(LED1, LOW);
digitalWrite(LED3, HIGH);
Serial.println("Apaga rojo");
Serial.println("Enciende Verde");
delay(900);
digitalWrite(LED3, LOW);
delay(300);
digitalWrite(LED3, HIGH);
delay(300);
digitalWrite(LED3, LOW);
delay(500);
digitalWrite(LED3, HIGH);
delay(300);
digitalWrite(LED3, LOW);
delay(500);
digitalWrite(LED3, HIGH);
delay(300);
digitalWrite(LED3, LOW);
digitalWrite(LED2, HIGH);
Serial.println("Apaga verde");
Serial.println("Enciende amarillo");
delay(900);
digitalWrite(LED2, LOW);
Serial.println("Apaga amarillo");
} else {
Serial.println("Parpadeo amarillo");
digitalWrite(LED2, HIGH);
delay(1000);
digitalWrite(LED2, LOW);
delay(1000);
}
}
Semáforo con Sensor de Luz y botón
Vamos a encender el LED cuando hay poco luz, de lo contrario se debe apagar. En el día el peatón puede cambiar el estado del semáforo, pero si es de noche no puede cambiar.
Material
| Cantidad | Descripción |
|---|---|
| 1 | Placa ESP32 |
| 3 | LED |
| 3 | R330 |
| 1 | Push button |
| 1 | R1k |
| 1 | R10k |
| 1 | LDR |
Diagrama pictórico

Simulación

Código
#define LED1 32 //ROJO
#define LED2 33 //AMARILLO
#define LED3 25 //VERDE
#define pinADC 34 //pin que sera leído del ADC
#define btn 27 //pin para el botón
#define LIMIT 2000 // esta constante es para la comparación del sensor de luz
// the setup function runs once when you press reset or power the board
void setup() {
pinMode(LED1, OUTPUT);
pinMode(LED2, OUTPUT);
pinMode(LED3, OUTPUT);
pinMode(btn, INPUT);
digitalWrite(LED1, LOW);
digitalWrite(LED2, LOW);
digitalWrite(LED3, LOW);
Serial.begin(115200);
}
// the loop function runs over and over again forever
void loop() {
int valueLDR = analogRead(pinADC); //leemos el pin del ADC
Serial.print("Valor del ADC: ");
Serial.println(valueLDR);
if (valueLDR < LIMIT) {
if ( digitalRead(btn) == 1) {
digitalWrite(LED1, HIGH);
Serial.println("Enciende rojo");
delay(2000);
digitalWrite(LED1, LOW);
digitalWrite(LED3, HIGH);
Serial.println("Apaga rojo");
Serial.println("Enciende Verde");
delay(900);
digitalWrite(LED3, LOW);
delay(300);
digitalWrite(LED3, HIGH);
delay(300);
digitalWrite(LED3, LOW);
delay(500);
digitalWrite(LED3, HIGH);
delay(300);
digitalWrite(LED3, LOW);
delay(500);
digitalWrite(LED3, HIGH);
delay(300);
digitalWrite(LED3, LOW);
digitalWrite(LED2, HIGH);
Serial.println("Apaga verde");
Serial.println("Enciende amarillo");
delay(900);
digitalWrite(LED2, LOW);
Serial.println("Apaga amarillo");
} else {
digitalWrite(LED1, LOW);
digitalWrite(LED2, LOW);
digitalWrite(LED3, HIGH);
Serial.println("Verde parpadeando");
delay(500);
digitalWrite(LED3, LOW);
delay(500);
}
} else {
Serial.println("Parpadeo amarillo");
digitalWrite(LED2, HIGH);
delay(1000);
digitalWrite(LED2, LOW);
delay(1000);
}
}
Salida Analógica (PWM)
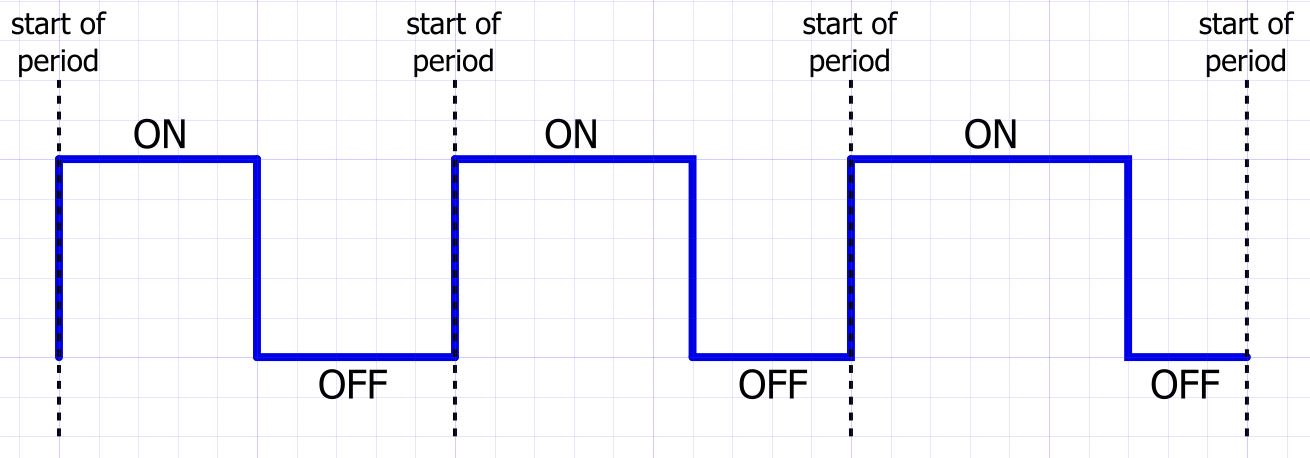
Modulación de Ancho de Pulso (Pulse width modulation (PWM)) es una manera artificial de generar una salida analógica en un pin digital. Existen dos parámetros asociados al PWM que son la frecuencia y el ciclo de trabajo (duty cycle).
El ciclo de trabajo define que tan largo sera el estado del pin en alto de un periodo. El máximo ciclo de trabajo es cuando el pin esta todo el tiempo en alto (100%) y el mínimo todo el tiempo en bajo (0%).
En el ESP8266 todos los pines (excepto el GPIO16 o el pin 0) soportan PWM en su salida.
Limitación del PWM
La limitación es que todos deben correr a la misma frecuencia de trabajo, la cual esta entre 1Hz y 1kHz

Configuración de PWM en ESP32
Características del PWM en el ESP32
- 16 Canales.
Canal 0 - 15(excepto los pines GPIO36, GPIO39, GPIO34, y GPIO35) - Resolución de 1 - 16 bits.
- 3 Funciones para control y configuración

Las funciones para el PWM v2.x
ledcSetup: Para configuración de inicio del PWMledcAttachPin: Asigna la configuración al pin indicadoledcWrite: Escribe el valor que saldrá por el pin.
Detalles de la funciones
ledcSetup(canal_PWM, frecuencia, resolucion): Es la primera funcion que se debe llamar y solo una vez para configurar el comportamiento del PWMcanal_PWM: Es un valor del 0 al 15, donde se selecciona el canal que usaremos del uCfrecuencia: Es la frecuencia de trabajo del PWM. Vamos a manejar por default 1000 (1kHz)resolucion: Tenemos desde 1 a 16 bits de resolución, en la mayoria de aplicaciones con 8 bits es suficiente o hasta 10 bits. Recordemos que para saber cual sera el valor minimo debemos de aplicar \(3.3V/resolucion_{bits}\). Con 8 bits sería \(3.3/256=0.012V\)ledcAttachPin(pin, canal_PWM):pin: Es el numero del pin que vamos a usar como salida PWM (ver el esquema de los pines que podemos usar)canal_PWM: El canal que colocamos en la función anteriorledcWrite(canal_PWM, valorPWM): La función que se encarga de poner el valor en el pin indicado con un cierto ciclo de trabajo.canal_PWM: El canal que estamos usando para el PWMvalorPWM: El valor que queremos asignar. Recordar que el valor esta en función de la resolución. Por ejemplo, si estamos usando 8 bits, los valores van desde 0 a 255.
Las funciones para el PWM v3.x
ledcAttachChannel: Para configuración de inicio del PWM y Asigna la configuración al pin indicadoledcWrite: Escribe el valor que saldrá por el pin.
Detalles de la funciones
ledcAttachChannel(pin, frecuencia, resolucion, canal_PWM): Es la primera función que se debe llamar y solo una vez para configurar el comportamiento del PWMcanal_PWM: Es un valor del 0 al 15, donde se selecciona el canal que usaremos del uCfrecuencia: Es la frecuencia de trabajo del PWM. Vamos a manejar por default 1000 (1kHz)resolucion: Tenemos desde 1 a 16 bits de resolución, en la mayoría de aplicaciones con 8 bits es suficiente o hasta 10 bits. Recordemos que para saber cual sera el valor mínimo debemos de aplicar \(3.3V/resolucion_{bits}\). Con 8 bits sería \(3.3/256=0.012V\)pin: Es el numero del pin que vamos a usar como salida PWM (ver el esquema de los pines que podemos usar)ledcWrite(pin, duty): La función que se encarga de poner el valor en el pin indicado con un cierto ciclo de trabajo.pin: Es el numero del pin que vamos a usar como salida PWM (ver el esquema de los pines que podemos usar)duty: Ciclo de trabajo al que se le asignara al pin de salida, es decir, el valor del PWM.
Ver mas detalles en la documentación oficial
Nota: Se colocan las 2 versiones porque el equipo de Arduino oficial continua en la version 2.x y Espressif va en la version 3.x
Control LED RGB
Haremos un simple cambio de color, incrementando el brillo de cada uno.
Warning
Se esta utilizando en LED RGB de cátodo común, si usas uno de Ánodo común, haz tu ajuste en el código y las conexiones
Diagrama pictórico

Animación


Código 2.x
#define LED_R 25 // PIN LED ROJO
#define LED_G 26 // PIN LED VERDE
#define LED_B 27 // PIN LED AZUL
#define FREQ 1000 // frecuencia de trabajo para el PWM a 1KHz
#define ledChannel0 0 //defino el canal 0, que usaremos para el color Rojo
#define ledChannel1 1 //defino el canal 1, que usaremos para el color Verde
#define ledChannel2 2 //defino el canal 2, que usaremos para el color Azul
#define resolution 8 // 8-bit de resolución (para Leds es ideal)
void setup() {
// configuro el comportamiento del canal
ledcSetup(ledChannel0, FREQ, resolution);
ledcSetup(ledChannel1, FREQ, resolution);
ledcSetup(ledChannel2, FREQ, resolution);
//se asigna el Pin al canal configurado previamente
ledcAttachPin(LED_R, ledChannel0);
ledcAttachPin(LED_G, ledChannel1);
ledcAttachPin(LED_B, ledChannel2);
}
void loop() {
//se apagan todos los Leds
ledcWrite(ledChannel0, 0);
ledcWrite(ledChannel1, 0);
ledcWrite(ledChannel2, 0);
delay(15);
// Incrementa el brillo del rojo
for (int dutyCycle = 0; dutyCycle <= 255; dutyCycle++) {
ledcWrite(ledChannel0, dutyCycle);
delay(15);
}
// Incrementa el brillo del verde
for (int dutyCycle = 0; dutyCycle <= 255; dutyCycle++) {
ledcWrite(ledChannel1, dutyCycle);
delay(15);
}
// Incrementa el brillo del azul
for (int dutyCycle = 0; dutyCycle <= 255; dutyCycle++) {
ledcWrite(ledChannel2, dutyCycle);
delay(15);
}
}
Código 3.x
#define LED_R 13 // PIN LED ROJO
#define LED_G 12 // PIN LED VERDE
#define LED_B 14 // PIN LED AZUL
#define FREQ 1000 // frecuencia de trabajo para el PWM a 1KHz
#define ledChannel0 0 //defino el canal 0, que usaremos para el color Rojo
#define ledChannel1 1 //defino el canal 1, que usaremos para el color Verde
#define ledChannel2 2 //defino el canal 2, que usaremos para el color Azul
#define resolution 8 // 8-bit de resolución (para Leds es ideal)
void setup() {
// configuro el comportamiento del canal
ledcAttachChannel(LED_R, FREQ, resolution, ledChannel0);
ledcAttachChannel(LED_G, FREQ, resolution, ledChannel1);
ledcAttachChannel(LED_B, FREQ, resolution, ledChannel2);
Serial.begin(115200);
}
void loop() {
//se apagan todos los Leds
ledcWrite(LED_R, 0);
ledcWrite(LED_G, 0);
ledcWrite(LED_B, 0);
delay(15);
// Incrementa el brillo del rojo
for (int dutyCycle = 0; dutyCycle <= 255; dutyCycle++) {
ledcWrite(LED_R, dutyCycle);
Serial.println("enciendo rojo");
Serial.println(dutyCycle);
delay(15);
}
// Incrementa el brillo del verde
for (int dutyCycle = 0; dutyCycle <= 255; dutyCycle++) {
ledcWrite(LED_G, dutyCycle);
Serial.println("enciendo verde");
Serial.println(dutyCycle);
delay(15);
}
// Incrementa el brillo del azul
for (int dutyCycle = 0; dutyCycle <= 255; dutyCycle++) {
ledcWrite(LED_B, dutyCycle);
Serial.println("enciendo azul");
Serial.println(dutyCycle);
delay(15);
}
}
Control de Intensidad de un LED botones
Haremos un simple cambio de color con botones, incrementando el brillo de cada uno cuando se presione un botón, para su respectivo color.
Warning
Se esta utilizando en LED RGB de cátodo común, si usas uno de Ánodo común, haz tu ajuste en el código y las conexiones
Diagrama pictórico

Animación

Código 2.x
#define LED_R 25 // PIN LED ROJO
#define LED_G 26 // PIN LED VERDE
#define LED_B 27 // PIN LED AZUL
#define BTN_R 34 // PIN LED ROJO
#define BTN_G 35 // PIN LED VERDE
#define BTN_B 32 // PIN LED AZUL
#define FREQ 1000 // frecuencia de trabajo para el PWM a 1KHz
#define ledChannel0 0 //defino el canal 0, que usaremos para el color Rojo
#define ledChannel1 1 //defino el canal 1, que usaremos para el color Verde
#define ledChannel2 2 //defino el canal 2, que usaremos para el color Azul
#define resolution 8 // 8-bit resolution
void setup() {
pinMode(BTN_R, INPUT);
pinMode(BTN_G, INPUT);
pinMode(BTN_B, INPUT);
// configuro el comportamiento del canal
ledcSetup(ledChannel0, FREQ, resolution);
ledcSetup(ledChannel1, FREQ, resolution);
ledcSetup(ledChannel2, FREQ, resolution);
//se asigna el Pin al canal configurado previamente
ledcAttachPin(LED_R, ledChannel0);
ledcAttachPin(LED_G, ledChannel1);
ledcAttachPin(LED_B, ledChannel2);
//se apagan todos los Leds
ledcWrite(ledChannel0, 0);
ledcWrite(ledChannel1, 0);
ledcWrite(ledChannel2, 0);
Serial.begin(115200);
}
unsigned char red = 0;
unsigned char blue = 0;
unsigned char green = 0;
unsigned char inc = 5;
void loop() {
// Incrementa el brillo del rojo
if (digitalRead(BTN_R) == 1) {
if (red > 254) {
red = 0;
} else {
red += inc;
}
ledcWrite(ledChannel0, red);
Serial.print("Rojo: ");
Serial.println(red);
delay(200);
}
if (digitalRead(BTN_G) == 1) {
if (green > 254) {
green = 0;
} else {
green += inc;
}
ledcWrite(ledChannel1, green);
Serial.print("Verde: ");
Serial.println(green);
delay(200);
}
if (digitalRead(BTN_B) == 1) {
if (blue > 254) {
blue = 0;
} else {
blue += inc;
}
ledcWrite(ledChannel2, blue);
Serial.print("Azul: ");
Serial.println(blue);
delay(200);
}
}
Código 3.x
#define LED_R 25 // PIN LED ROJO
#define LED_G 26 // PIN LED VERDE
#define LED_B 27 // PIN LED AZUL
#define BTN_R 34 // PIN LED ROJO
#define BTN_G 35 // PIN LED VERDE
#define BTN_B 32 // PIN LED AZUL
#define FREQ 1000 // frecuencia de trabajo para el PWM a 1KHz
#define ledChannel0 0 //defino el canal 0, que usaremos para el color Rojo
#define ledChannel1 1 //defino el canal 1, que usaremos para el color Verde
#define ledChannel2 2 //defino el canal 2, que usaremos para el color Azul
#define resolution 8 // 8-bit resolution
void setup() {
pinMode(BTN_R, INPUT);
pinMode(BTN_G, INPUT);
pinMode(BTN_B, INPUT);
// configuro el comportamiento del canal y se asigna el Pin al canal configurado
ledcAttachChannel(LED_R, FREQ, resolution, ledChannel0);
ledcAttachChannel(LED_G, FREQ, resolution, ledChannel1);
ledcAttachChannel(LED_B, FREQ, resolution, ledChannel2);
//se apagan todos los Leds
ledcWrite(LED_R, 0);
ledcWrite(LED_G, 0);
ledcWrite(LED_B, 0);
Serial.begin(115200);
}
unsigned char red = 0;
unsigned char blue = 0;
unsigned char green = 0;
unsigned char inc = 5;
void loop() {
// Incrementa el brillo del rojo
if (digitalRead(BTN_R) == 1) {
if (red > 254) {
red = 0;
} else {
red += inc;
}
ledcWrite(LED_R, red);
Serial.print("Rojo: ");
Serial.println(red);
delay(200);
}
if (digitalRead(BTN_G) == 1) {
if (green > 254) {
green = 0;
} else {
green += inc;
}
ledcWrite(LED_G, green);
Serial.print("Verde: ");
Serial.println(green);
delay(200);
}
if (digitalRead(BTN_B) == 1) {
if (blue > 254) {
blue = 0;
} else {
blue += inc;
}
ledcWrite(LED_B, blue);
Serial.print("Azul: ");
Serial.println(blue);
delay(200);
}
}
Control de intensidad de un LED con potenciómetro
Haremos un simple cambio de color con botones, incrementando el brillo de cada uno cuando moviendo el vástago de un potenciómetro, cada uno hará el cambio de su respectivo color.
Warning
Se esta utilizando en LED RGB de cátodo común, si usas uno de Ánodo común, haz tu ajuste en el código y las conexiones
Diagrama pictórico

Animación

Código
#define LED_R 25 // PIN LED ROJO
#define LED_G 26 // PIN LED VERDE
#define LED_B 27 // PIN LED AZUL
#define POT_R 34 // PIN LED ROJO
#define POT_G 35 // PIN LED VERDE
#define POT_B 32 // PIN LED AZUL
#define FREQ 1000 // frecuencia de trabajo para el PWM a 1KHz
#define ledChannel0 0 //defino el canal 0, que usaremos para el color Rojo
#define ledChannel1 1 //defino el canal 1, que usaremos para el color Verde
#define ledChannel2 2 //defino el canal 2, que usaremos para el color Azul
#define resolution 8 // 8-bit resolution
void setup() {
// configuro el comportamiento del canal
ledcSetup(ledChannel0, FREQ, resolution);
ledcSetup(ledChannel1, FREQ, resolution);
ledcSetup(ledChannel2, FREQ, resolution);
//se asigna el Pin al canal configurado previamente
ledcAttachPin(LED_R, ledChannel0);
ledcAttachPin(LED_G, ledChannel1);
ledcAttachPin(LED_B, ledChannel2);
//se apagan todos los Leds
ledcWrite(ledChannel0, 0);
ledcWrite(ledChannel1, 0);
ledcWrite(ledChannel2, 0);
Serial.begin(115200);
}
void loop() {
int red = analogRead(POT_R);
int blue = analogRead(POT_B);
int green = analogRead(POT_G);
red = map(red, 0, 4095, 0, 255); //se esta convirtiendo el valor del ADC de 0 a 4095 a un valor de 8 bits, es decir, de 0 a 255
blue = map(blue, 0, 4095, 0, 255); //se esta convirtiendo el valor del ADC de 0 a 4095 a un valor de 8 bits, es decir, de 0 a 255
green = map(green, 0, 4095, 0, 255); //se esta convirtiendo el valor del ADC de 0 a 4095 a un valor de 8 bits, es decir, de 0 a 255
// Incrementa el brillo del rojo
ledcWrite(ledChannel0, red);
Serial.print("Rojo: ");
Serial.println(red);
ledcWrite(ledChannel1, green);
Serial.print("Verde: ");
Serial.println(green);
ledcWrite(ledChannel2, blue);
Serial.print("Azul: ");
Serial.println(blue);
delay(15);
}
Servomotor
El servomotor que utilizaremos el SG-90, es un servomotor básico.

Este motor necesita la siguiente señal para poder generar su desplazamiento:

Atención
Un servomotor solo se puede desplazar desde 0° hasta 180°. Por default siempre esta en 90°. Pero, comúnmente se considera 0°, dado que gira hasta 90° y -90°.
Fuente adicional de 5V
Para hacer funcionar el servomotor se debe implementar una fuente adicional de 5V, ya que la propia placa NodeMCU no puede dar la suficiente corriente al motor y su sistema para funcionar adecuadamente.
Note
El dato mínimo que equivale a 0 grados es 25 en el valor de PWM, y para los 180 grados o máximo es de 127. Estos valores los obtuve haciendo experimentos y pruebas con estos elementos.
| Ángulo | PWM |
|---|---|
| 0 grados | 25 |
| 90 grados | 76 |
| 180 grados | 127 |
Note
Descargar librería. Dar click aquí. Ver la instalación manual -> aquí
Note
 .
.
Servomotor básico
Se realiza un movimiento de ida y vuelta en el servomotor, de manera automática.
Warning
Se necesita un fuente externa de 5V para el correcto funcionamiento del servomotor.
Animación

Diagrama pictórico

Código
#include <ESP32Servo.h>
#define pos 0 // variable que guarda la posición del servo
#define SERVO_PIN 25
// Los GPIO recomendados para colocar el Servo en ESP32 2,4,12-19,21-23,25-27,32-33
Servo myservo; // Crea el objeto para el control del servomotor
// Puede controlar hasta 16 servos
void setup() {
// permite el uso de todos los timer, siempre deja esta sección, y no preguntes por qué
ESP32PWM::allocateTimer(0);
ESP32PWM::allocateTimer(1);
ESP32PWM::allocateTimer(2);
ESP32PWM::allocateTimer(3);
myservo.setPeriodHertz(50); // estándar de trabajo del servo es a 50 hz
myservo.attach(SERVO_PIN, 500, 2400); // configuramos el objeto del servo
// por default se usa min/max de 1000us and 2000us
// Si usas otro servo se deben ajustar los tiempos para el giro de 180 grados
}
void loop() {
for (pos = 0; pos <= 180; pos += 1) { // va desde 0 a 180 grados
// in steps of 1 degree
myservo.write(pos); // le indica al servo en donde colocarse
delay(15); // espera 15ms para la siguiente posición
}
for (pos = 180; pos >= 0; pos -= 1) { // va desde 180 a 0 grados
myservo.write(pos); // le indica al servo en donde colocarse
delay(15); // espera 15ms para la siguiente posición
}
}
Control de giro de Servomotor con potenciómetro
Se va a realizar un control de la posición del servo en función de la posición de un potenciómetro
Warning
Se necesita un fuente externa de 5V para el correcto funcionamiento del servomotor.
Diagrama pictórico

Animación

Código
#include <ESP32Servo.h>
Servo myservo; // Crea el objeto para el control del servomotor
#define SERVO 25 // pin donde colocamos el servo
#define POT 34
void setup() {
// permite el uso de todos los timer, siempre deja esta sección, y no preguntes por qué
ESP32PWM::allocateTimer(0);
ESP32PWM::allocateTimer(1);
ESP32PWM::allocateTimer(2);
ESP32PWM::allocateTimer(3);
myservo.setPeriodHertz(50);// estándar de trabajo del servo es a 50 hz
myservo.attach(SERVO, 500, 2400); // usando el SG90 servo min/max de 500us y 2400us
// para MG995 servo, usa 1000us y 2000us
}
void loop() {
int val = analogRead(POT); // Lee el valor del potenciómetro
val = map(val, 0, 4096, 0, 180); // Convierte el valor de ADC a grados
myservo.write(val); // ajusta los grados que colocara el servo
delay(200); //espera 200mS para hacer el cambio
}
Control de velocidad de Motor DC
Vamos a realizar un control de velocidad con un motor DC, utilizando un potenciómetro para definir la velocidad y mostrando la velocidad en una pantalla LCD
Diagrama pictórico
Animación
Código