Las entradas digitales son solo 2 formas, recibir un nivel logico 0 o un nivel logico 1 , las cuales indican un estado en la entrada y con base a ello tomar desiciones para realizar una o varias tareas.
Las entradas en el microcontrolador son
nivel lógico 1
o
alto
, lo que tendremos en pin a la entrada será un nivel de voltaje de
5V
, en caso de recibir un
0
o
bajo
, es equivalente a
0V
.
| Programacion | Nivel lógico | Digital | Voltaje |
|---|---|---|---|
| False | 0 | Bajo | 0V |
| True | 1 | Alto | 5V |
Para poder leer datos de la tarjeta debemos habilitar unas opciones más, de lo contrario no podrá leer saber si ha recibido informacion.
Debemos configuar que será entrada el pin y ademas activar un iterador en la libreria, el cual hace posible leer datos de entrada.
# importamos los elementos necesarios
from pyfirmata import Arduino, util, INPUT
PORT = 'COM#'
board = Arduino(PORT)
it = util.Iterator(board) # le pasamos la tarjeta al iterador
it.start() #arrancamos a el iterador para poder leer entradas
# configuro el pin como ENTRADA
PIN = 2
board.digital[PIN].mode = INPUT
Ejemplo 1: Haremos un circuito que imprima el valor si el boton esta siendo presionado
from pyfirmata import Arduino, util, INPUT
from time import sleep
PORT = 'COM#'
board = Arduino(PORT)
it = util.Iterator(board) # le pasamos la tarjeta al iterador
it.start() #arrancamos a el iterador para poder leer entradas
# configuro el pin como ENTRADA
PIN = 2
board.digital[PIN].mode = INPUT
while True:
boton = board.digital[PIN].read() # leemos el valor del pin
print(boton) # mandamos a imprimir el valor por la terminal
sleep(0.5) # damos un tiempo entre pulsaciones
from pyfirmata import Arduino, util
from time import sleep
PORT = 'COM#'
board = Arduino(PORT)
it = util.Iterator(board) # le pasamos la tarjeta al iterador
it.start() #arrancamos a el iterador para poder leer entradas
# configuro el pin como ENTRADA
board.get_pin('d:2:i')
while True:
print(board.digital[2].read())
sleep(0.25)
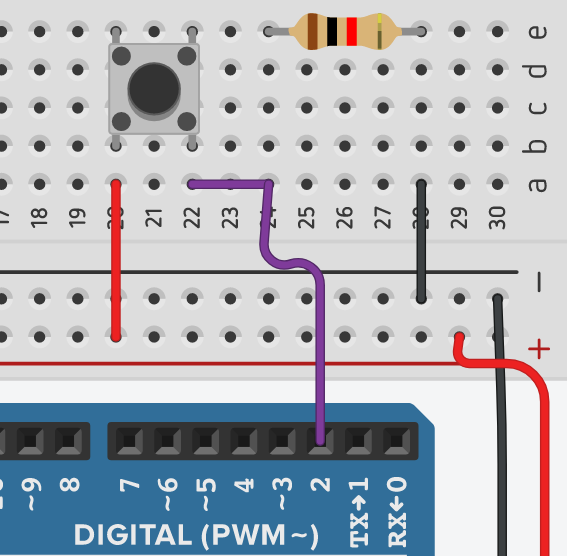
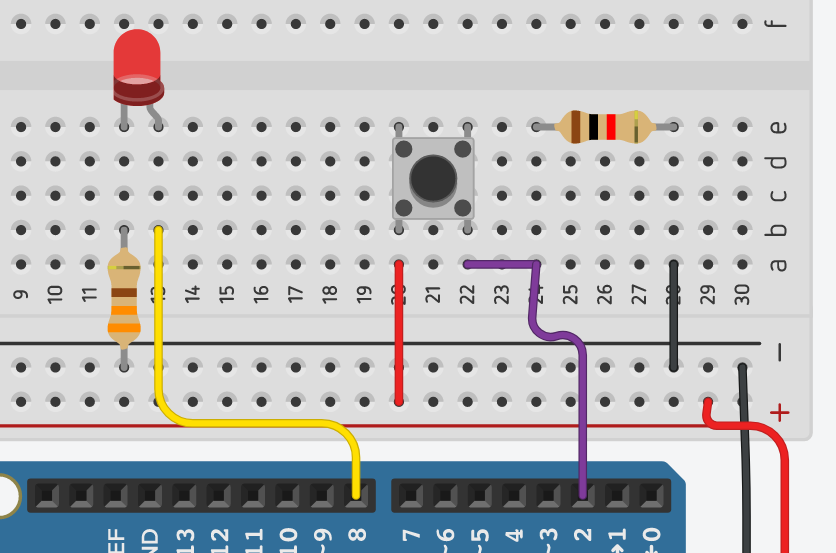
Existen dos formas de conexion de un boton hacia una entrada digital, una nos da un valor de un 1 por default (pull-up), mientras que la otra nos da un valor por default de 0 (pull-down)
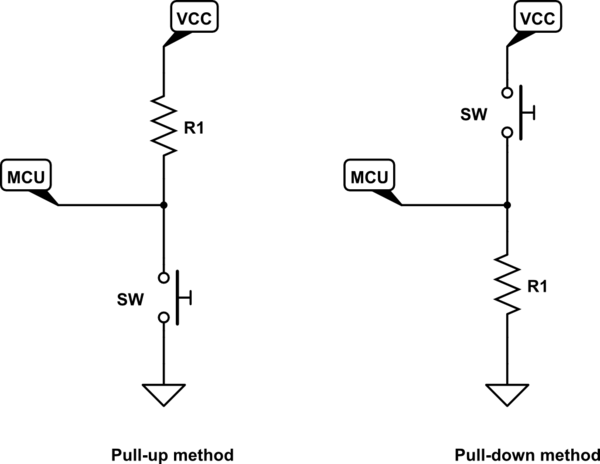
Fisicamente quedaría las siguientes maneras
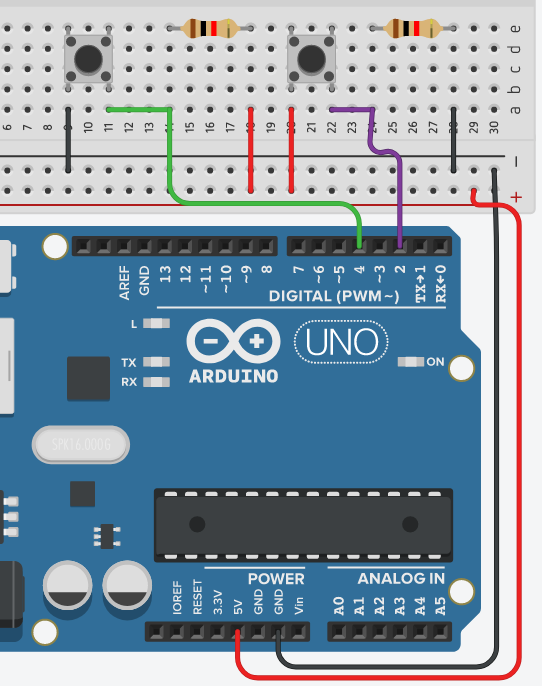
Ejemplo 1. Ahora vamos a aprende como encender un LED por medio de un boton, cuando el boton este presionado y mande un 1, se encienda el LED, en caso que no este presionado se estara recibiendo un 0, esto causa que el LED se apague.
# importamos los elementos necesarios
from pyfirmata import Arduino, util, INPUT
from time import sleep
PORT = 'COM#'
board = Arduino(PORT)
it = util.Iterator(board) # le pasamos la tarjeta al iterador
it.start() #arrancamos a el iterador para poder leer entradas
PIN = 2
# configuro el pin como ENTRADA
board.digital[PIN].mode = INPUT
LED = 8 # pin donde conecto el LED
while True:
boton = board.digital[PIN].read()
if boton: # es equivalente a board.digital[PIN].read() == True
board.digital[LED].write(1)
print('boton presionado')
sleep(0.1) # es un tiempo para estabilizar la pulsación en el boton y no saturar la conexión
else:
board.digital[LED].write(0)
sleep(0.1)
print('boton NO presionado')
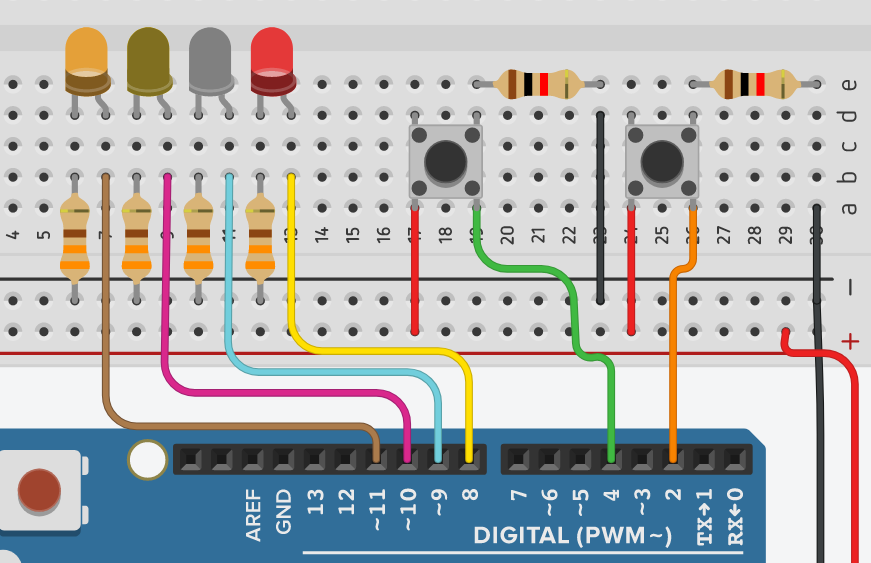
Ejemplo 2. Secuencia de luces por medio de botones. Se tendran 2 botones, al presionar uno se debe generar una secuencia de luces y al presionar el otro, se debe ver otra secuencia. Mientras no se presionen los botones se debe ver un parpadeo. Con 4 LEDs.
from pyfirmata import Arduino, util, INPUT
from time import sleep
PORT = 'COM#'
# importamos los elementos necesarios
board = Arduino(PORT)
it = util.Iterator(board) # le pasamos la tarjeta al iterador
it.start() #arrancamos a el iterador para poder leer entradas
BOTON1 = 2
BOTON2 = 4
# configuro el pin como ENTRADA
board.digital[BOTON1].mode = INPUT
board.digital[BOTON2].mode = INPUT
LED1 = 8 # pin donde conecto el LED
LED2 = 9 # pin donde conecto el LED
LED3 = 10 # pin donde conecto el LED
LED4 = 11 # pin donde conecto el LED
while True:
secuencia1 = board.digital[BOTON1].read()
secuencia2 = board.digital[BOTON2].read()
if secuencia1: # es equivalente a board.digital[PIN].read() == True
print('secuancia 1')
board.digital[LED1].write(1)
sleep(1)
board.digital[LED2].write(1)
sleep(1)
board.digital[LED3].write(1)
sleep(1)
board.digital[LED4].write(1)
sleep(1)
board.digital[LED1].write(0)
sleep(1)
board.digital[LED2].write(0)
sleep(1)
board.digital[LED3].write(0)
sleep(1)
board.digital[LED4].write(0)
elif secuencia2:
print('secuencia2')
board.digital[LED1].write(1)
board.digital[LED4].write(1)
sleep(2)
board.digital[LED2].write(1)
board.digital[LED3].write(1)
sleep(2)
board.digital[LED1].write(0)
board.digital[LED4].write(0)
sleep(2)
board.digital[LED2].write(0)
board.digital[LED3].write(0)
sleep(2)
else:
print('secuancia default')
board.digital[LED1].write(1)
board.digital[LED2].write(1)
board.digital[LED3].write(1)
board.digital[LED4].write(1)
sleep(1)
board.digital[LED1].write(0)
board.digital[LED2].write(0)
board.digital[LED3].write(0)
board.digital[LED4].write(0)
sleep(1)
Ejemplo 3. Al presionar el boton se debe quedar encendido y al volverlo a presionar debe apagarse.
from pyfirmata import Arduino, util, INPUT
from time import sleep
PORT = 'COM#'
board = Arduino(PORT)
it = util.Iterator(board) # le pasamos la tarjeta al iterador
it.start() #arrancamos a el iterador para poder leer entradas
# configuro el pin como ENTRADA
BOTON = 2
board.digital[BOTON].mode = INPUT
LED = 8
status = False #El estado del LED
board.digital[LED].write(status) #El led comienza apagado
while True:
boton = board.digital[BOTON].read()
if boton:
status = not status #invierto el estado, si estaba apagado se enciende, y visiversa
board.digital[LED].write(status)
sleep(0.25) # tiempo para evitar rebotes o transitorios
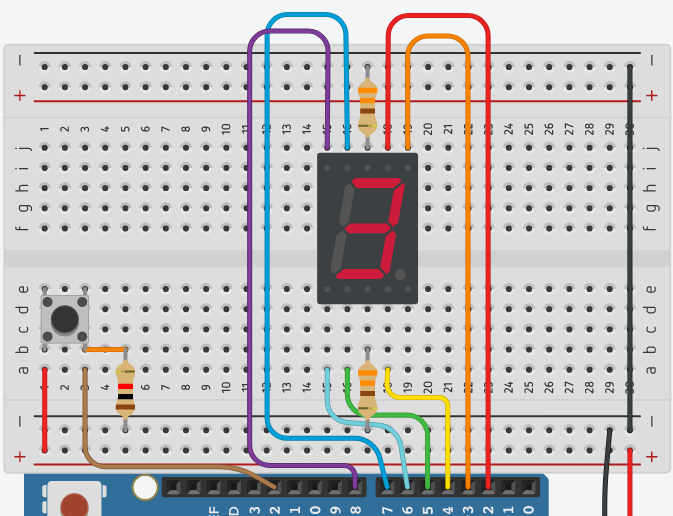
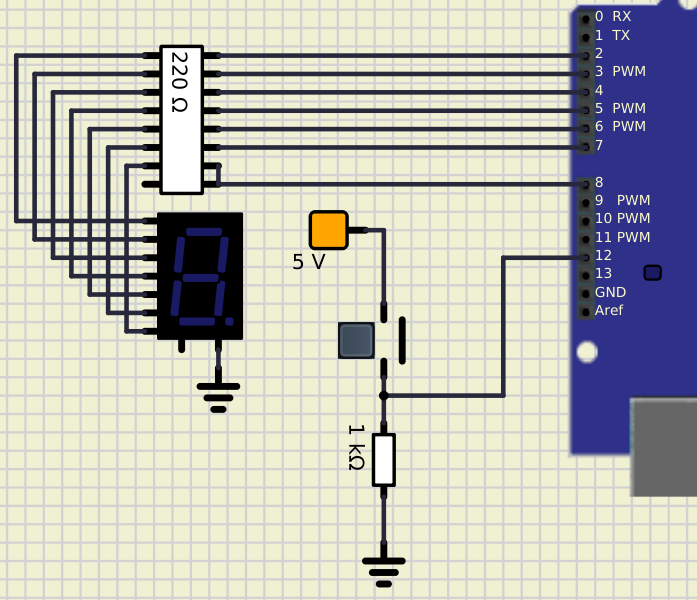
Ejemplo 3. Se desea crear un contador basico con un display de 7 segmentos, el cambio se hara con un boton. El contador va de 0 al 9. Cada vez que se presione el boton el valor va incrementando, cuando llegue a 9, el contador se reinicia a 0
from pyfirmata import Arduino, util, INPUT
from time import sleep
def display(number):
numbers = [number_0,number_1,number_2,number_3,number_4,number_5,number_6,number_7,number_8,number_9]
for position,segments in enumerate(numbers):
if position == number:
segments()
break
def number_0():
set_segment(1,1,1,1,1,1,0)
def number_1():
set_segment(0,1,1,0,0,0,0)
def number_2():
set_segment(1,1,0,1,1,0,1)
def number_3():
set_segment(1,1,1,1,0,0,1)
def number_4():
set_segment(0,1,1,0,0,1,1)
def number_5():
set_segment(1,0,1,1,0,1,1)
def number_6():
set_segment(0,0,1,1,1,1,1)
def number_7():
set_segment(1,1,1,0,0,0,0)
def number_8():
set_segment(1,1,1,1,1,1,1)
def number_9():
set_segment(1,1,1,1,0,1,1)
def set_segment(*segments):
display_pins = [2,3,4,5,6,7,8]
for pin, segment in enumerate(segments):
print(f'Pin a encender{board.digital[display_pins[pin]]}')
board.digital[display_pins[pin]].write(segment)
PORT = '/tmp/ttyS1'
# importamos los elementos necesarios
board = Arduino(PORT)
it = util.Iterator(board) # le pasamos la tarjeta al iterador
it.start() #arrancamos a el iterador para poder leer entradas
# configuro el pin como ENTRADA
BOTON = 12
board.digital[BOTON].mode = INPUT
count = 0
display(count)
sleep(0.1)
while True:
boton = board.digital[BOTON].read()
if boton:
count += 1
sleep(0.25)
display(count)
if count == 9: count = -1
Forma fea
from pyfirmata import Arduino, util, INPUT
from time import sleep
def display7(A,B,C,D,E,F,G,board,time=1 ):
# segmentos del display
SEGMENT_A = 2
SEGMENT_B = 3
SEGMENT_C = 4
SEGMENT_D = 5
SEGMENT_E = 6
SEGMENT_F = 7
SEGMENT_G = 8
board.digital[SEGMENT_A].write(A)
board.digital[SEGMENT_B].write(B)
board.digital[SEGMENT_C].write(C)
board.digital[SEGMENT_D].write(D)
board.digital[SEGMENT_E].write(E)
board.digital[SEGMENT_F].write(F)
board.digital[SEGMENT_G].write(G)
sleep(time)
PORT = 'COM#'
# importamos los elementos necesarios
board = Arduino(PORT)
it = util.Iterator(board) # le pasamos la tarjeta al iterador
it.start() #arrancamos a el iterador para poder leer entradas
# configuro el pin como ENTRADA
BOTON = 12
board.digital[BOTON].mode = INPUT
count = 0 # variable me ayuda a saber en la posicion en la que estoy
sleep(0.1)
display7(1,1,1,1,1,1,0,board) # coloco el cero
while True:
boton = board.digital[BOTON].read()
if boton:
count += 1
if count >= 5: # reset, el reinicio del conteo
count =0
if count == 0:
print('muestro el 0')
display7(1,1,1,1,1,1,0,board=board)
elif count == 1:
print('muestro el 1')
display7(0,1,1,0,0,0,0,board=board)
elif count == 2:
print('muestro el 2')
display7(1,1,0,1,1,0,1,board=board)
elif count == 3:
print('muestro el 3')
display7(1,1,1,1,0,0,1,board=board)
elif count == 4:
print('muestro el 4')
display7(1,0,0,0,1,1,1,board=board)
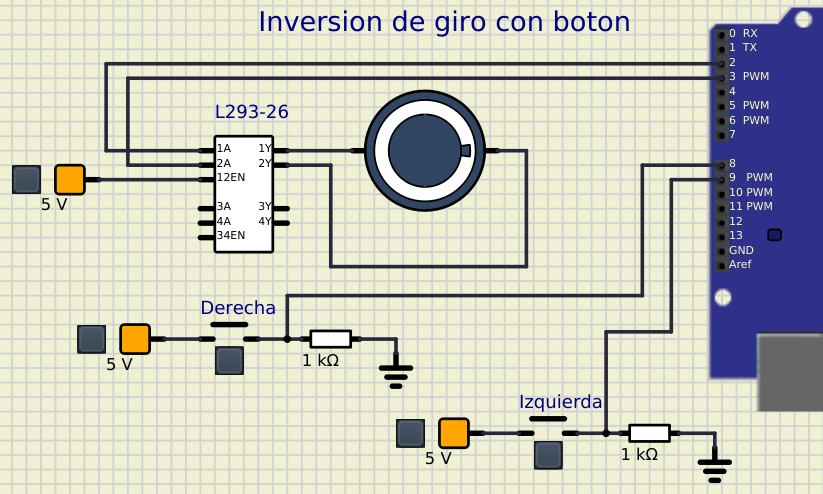
Ejemplo 4. Controlar la inversion de giro de un motor DC, con un boton el motor gira en un sentido y se queda funcionado hasta que se presione el mismo boton. Con otro boton gira en sentido contrario y si lo vuelvo a presionar que se apague el motor. En caso de presionar el boton contrario el motor se debe apagar un instate e invertir el giro.
from pyfirmata import Arduino, util
from time import sleep
def giro(board, pins=[2,3],values=[0,0]):
board.digital[pins[0]].write(values[0])
board.digital[pins[1]].write(values[1])
sleep(0.5) # estabilizar la salida al motor
PORT = 'COM#'
# importamos los elementos necesarios
board = Arduino(PORT)
it = util.Iterator(board) # le pasamos la tarjeta al iterador
it.start() #arrancamos a el iterador para poder leer entradas
# configuro el pin como ENTRADA
BOTON_R = 8
BOTON_L = 9
board.get_pin(f'd:{str(BOTON_R)}:i')
board.get_pin(f'd:{str(BOTON_L)}:i')
# Configuro los pines del motor
MOTOR_1 = 2
MOTOR_2 = 3
# variables que me indican el estado del motor y su sentido
status_r = False
status_l = False
while True:
boton_r = board.digital[BOTON_R].read()
boton_l = board.digital[BOTON_L].read()
sleep(0.02) #estabilizar la lectura del boton
if boton_r:
if not status_r and not status_l:
giro(board, [MOTOR_1, MOTOR_2], [1, 0])
status_r = True
elif status_l:
giro(board, [MOTOR_1, MOTOR_2], [0, 0])
sleep(0.25)
giro(board, [MOTOR_1, MOTOR_2], [1, 0])
status_r = True
status_l = False
else:
giro(board, [MOTOR_1, MOTOR_2], [0, 0])
status_r = False
if boton_l:
if not status_l and not status_r:
giro(board, [MOTOR_1, MOTOR_2], [0, 1])
status_l = True
elif status_r:
giro(board, [MOTOR_1, MOTOR_2], [0, 0])
sleep(0.25)
giro(board, [MOTOR_1, MOTOR_2], [0, 1])
status_l = True
status_r = False
else:
giro(board, [MOTOR_1, MOTOR_2], [0, 0])
status_l = False
get_pin('t:p:m')
¶
Existe otra manera de configurar los pines, es con el método
get_pin()
, el valor se pasa como string
str
separados por dos puntos
:
.
Tipo
a
: analogico
d
: digital
Número de pin en la tarjeta:
pin
: del 2 al 13
Modo:
i
: Entrada (input)
o
: Salida (output)
p
: PWM (salida analogica)
Ejemplos:
# pin 2 (D2) como salida de digital
pin2 = board.get_pin('d:2:o')
pin2.write(1)
# pin 4 (D4) como entrada de digital
pin4 = board.get_pin('d:4:i')
pin4.write(1)
# pin 0 (A0) como entrada analogica
analog_0 = board.get_pin('a:0:i')
analog_0.read()
# pin 3 (D3) como salida en PWM (Salida analogica)
pin3 = board.get_pin('d:3:p')
pin3.write(0.6)